学习控制是针对重复动态过程提出的,通过学习先前的操作来提高跟踪性能。通常需要沿着预定义的参考轨迹跟踪所有点。然而,在许多应用中,主要关注的只是在几个指定的时间点上的输出跟踪,而不是沿参考轨迹的所有点,并且在剩余的点上没有指定的性能约束。如中风康复训练中的患者需要完成点对点的运动,而不管点与点之间的轨迹是什么。
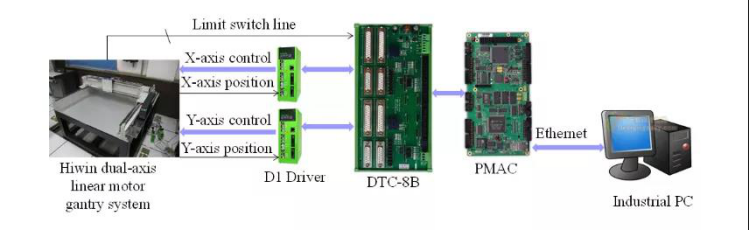
近日,我院池荣虎教授在《IEEE Transactions on Systems, Man, and Cybernetics: Systems》期刊发表论文题为An Improved Data-Driven Point-to-Point ILC Using Additional On-Line Control Inputs With Experimental Verification,该工作针对只考虑系统在多个中间指定点输出的非线性重复系统,提出了一种改进的数据驱动点对点迭代学习控制方法。根据预先指定的点将整个有限时间区间划分为多个时间子区间,然后通过设计新的目标函数,分段生成时间子区间上的最优控制输入。进一步,通过使用来自相同迭代的前一个时间子区间的额外输入信号,控制输入在时间子区间内进行更新,从而帮助改进控制性能结果。基于此,消除对不重要中间点的约束,可以设计出附加自由度的控制系统,以获得对指定点更好的跟踪性能。同时,该方法是数据驱动的,控制系统的设计和分析不需要过程模型。通过非线性间歇反应器的仿真和永磁直线电机伺服机构的实验验证了该方法的有效性。
该工作以我校为唯一通讯单位,池荣虎教授为论文第一作者兼通讯作者。论文链接https://ieeexplore.ieee.org/document/ 7914762,IF = 7.351。《IEEE Transactions on Systems, Man, and Cybernetics: Systems》期刊在计算机控制论双学科的顶级期刊排名第二,是中科院计算机类一区期刊。IEEE全称为Institute of Electrical and Electronics Engineers(电子电气工程师协会),是国际上最大的非营利性专业技术学会,其会员40余万人遍布160多个国家,按领域分为36个技术学会。IEEE SMC学会是其中一个资深学会,已有50多年的历史,并且与中国自动化学会一直保持非常密切的互动。
该成果得到了国家科学基金及山东省泰山学者计划的资助。
(撰稿:张郁浩;审核:马寒)

 当前位置:
当前位置: